



2 ღერძიანი საფეხუროვანი წამყვანი R60X2


პროდუქტის შესავალი



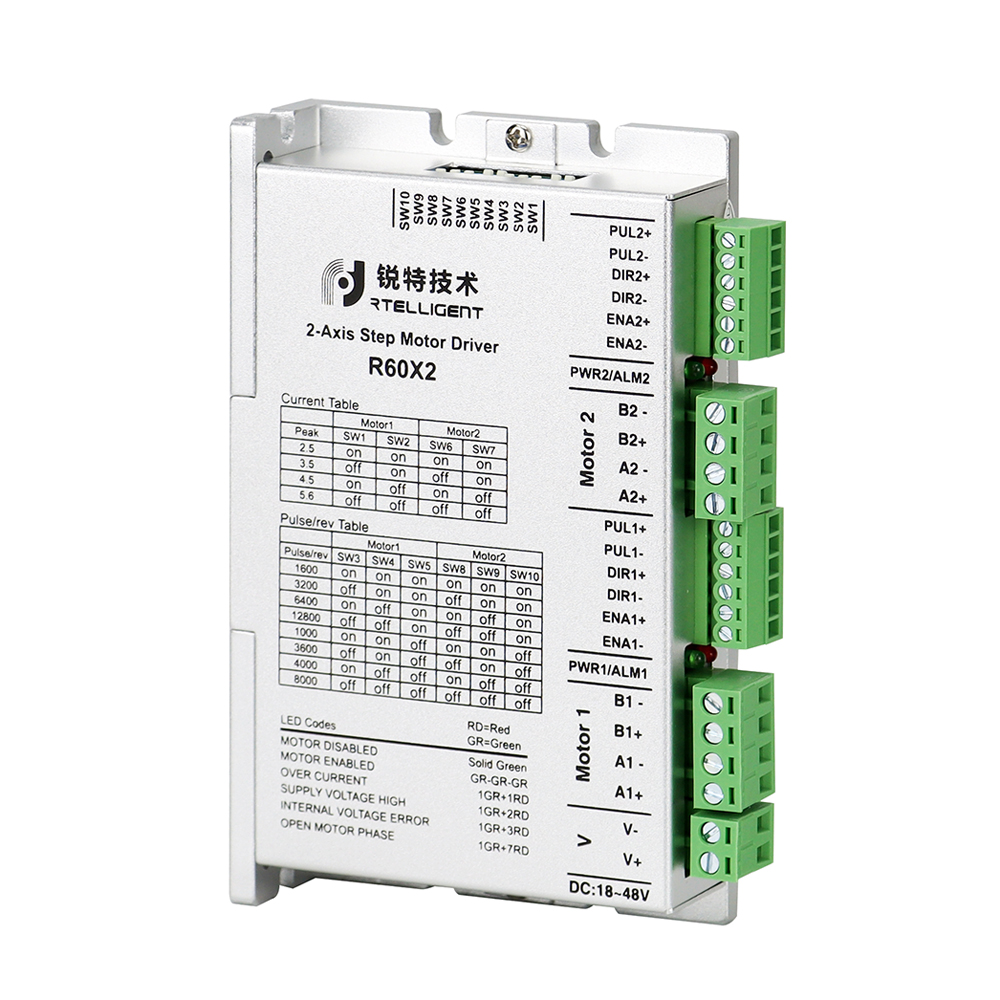
კავშირი

მახასიათებლები
| ელექტრომომარაგება | 24 - 48 ვოლტი მუდმივი ძაბვა |
| გამომავალი დენი | 5.6 ამპერამდე (პიკი) |
| მიმდინარე კონტროლი | PID დენის კონტროლის ალგორითმი |
| სეგმენტის პარამეტრები | DIP გადამრთველის პარამეტრი, 8 ვარიანტი |
| სიჩქარის დიაპაზონი | გამოიყენეთ შესაბამისი სტეპერ ძრავა, 3000 ბრ/წთ-მდე |
| რეზონანსის ჩახშობა | რეზონანსული წერტილის ავტომატურად გამოთვლა და IF ვიბრაციის დათრგუნვა |
| პარამეტრის ადაპტაცია | დრაივერის ინიციალიზაციისას ძრავის პარამეტრის ავტომატურად აღმოჩენა, კონტროლის შესრულების ოპტიმიზაცია |
| პულსური რეჟიმი | მხარდაჭერა პულსი + მიმართულება, ორმაგი პულსი |
| პულსის ფილტრაცია | 2MHz ციფრული სიგნალის ფილტრი |
| უმოქმედო დენი | ძრავის გაჩერების შემდეგ დენის ავტომატურად განახევრება |
მიმდინარე პარამეტრი
| ღერძი-1 | ღერძი-2 |
| |||
| პიკური დენი | SW1 | SW2 | SW6 | SW7 | შენიშვნა |
| 2.5A | on | on | on | on | სხვა მიმდინარე მნიშვნელობების მორგება შესაძლებელია |
| 3.5A | გამორთული | on | გამორთული | on | |
| 4.5A | on | გამორთული | on | გამორთული | |
| 5.6A | გამორთული | გამორთული | გამორთული | გამორთული | |
მიკრო-სტეპინგი
| ღერძი-1 | ღერძი-2 |
| ||||||
| ნაბიჯები/რევოლუცია | SW3 | SW4 | SW5 | SW8 | SW9 | SW10 | შენიშვნა | |
| 1600 წელი | on | on | on | on | on | on | სხვა მიმდინარე მნიშვნელობების მორგება შესაძლებელია | |
| 3200 | გამორთული | on | on | გამორთული | on | on | ||
| 6400 | on | გამორთული | on | on | გამორთული | on | ||
| 12800 | გამორთული | გამორთული | on | გამორთული | გამორთული | on | ||
| 1000 | on | on | გამორთული | on | on | გამორთული | ||
| 3600 | გამორთული | on | გამორთული | გამორთული | on | გამორთული | ||
| 4000 | on | გამორთული | გამორთული | on | გამორთული | გამორთული | ||
| 8000 | გამორთული | გამორთული | გამორთული | გამორთული | გამორთული | გამორთული | ||
-
 Rtelligent R60X2-ის მომხმარებლის სახელმძღვანელო
Rtelligent R60X2-ის მომხმარებლის სახელმძღვანელო





